
In Cambodia, landmines left from previous conflicts are epidemic to the country. Aside from injury and death, landmines prevent people from using land. At present, the country is dependent on agriculture, so large amounts of land are required to continue growth. Explosive ordnance disposal (EOD) technicians are working to remove mines, but due to the hazardous nature of the work and the thick vegetation found all over Cambodia, each technician clears at most ten square meters in a day. The Minebot project is intended to create autonomous robots to assist the technicians in clearing land quickly so it can be released for development.
As pictures can show, the Minebot is a segmented tracked vehicle with a carbon fiber exterior. A quick glance inside reveals an Arduino Uno for motor control and a much more advanced Nvidia Jetson TK-1 for image processing and high-level decision making. The Minebot itself has capabilities for routine mine detection, such as ground and metal scanning.
The Jetson’s main purpose in this project is to process data from a light detection and ranging (LIDAR) sensor and a GPS. The LIDAR is used to find the relative location of objects in the robot’s field of view. The GPS, as commonly used, finds the absolute location of the robot on earth. The two sensors have a combined purpose called area reduction. Area reduction is the process in which a suspected minefield is scanned by robots to identify probable mined areas.
As with any other design, new iterations are required. The LIDAR system rotates about itself, but to increase the area it can scan, it performs what is called nodding. Nodding is a second rotation of the camera about its side, usually performed externally.
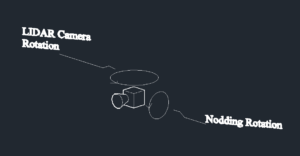 Figure 2. Visual aid for rotation
Figure 2. Visual aid for rotation
 Figure 3. LIDAR mounted on nodding mechanism
Figure 3. LIDAR mounted on nodding mechanism
Currently, the team is switching out the previous design’s stepper motor with a DC motor. To provide some background, a stepper motor is a motor with a discrete number of positions it can rotate to. This was done because the stepper motor did not have definite speed control, which is necessary for certain scan patterns.
The MineBot’s drive train has an issue where debris gets caught in the plastic tread deployed now. The debris causes the motors to request large amounts of power to keep moving, which can burn out the motors over time. Future improvements could be as simple as material selection and aggressiveness of tread, but further study is required.
Recent Comments